Difference between revisions of "Xiaomi Roborock LIDAR"
| (8 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
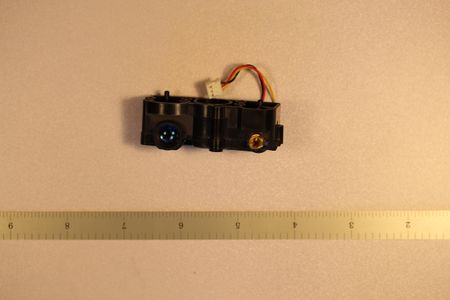
| − | [[File: | + | [[File:Roborock_LIDAR.jpg|alt=|thumb|Xiaomi Roborock LIDAR]]LIDAR from the Xiaomi robotic vacuum, very similar in design to the one used in the Neato XV-11. |
| + | |||
| + | <br /> | ||
==Teardown Video== | ==Teardown Video== | ||
| Line 5: | Line 7: | ||
<br /> | <br /> | ||
<youtube width="320" height="240">aAFY8p1glmM</youtube> | <youtube width="320" height="240">aAFY8p1glmM</youtube> | ||
| + | |||
| + | ==PCB Pictures== | ||
| + | <gallery mode="packed-hover" heights="200"> | ||
| + | File:Rubby CMOS MBV05-top.jpg|LIDAR CMOS sensor and DSP board - top side | ||
| + | File:Rubby CMOS MBV05-bottom.jpg|LIDAR CMOS sensor and DSP board - bottom side (BENFEI connector to balance board for picture) | ||
| + | File:Wireless Board-top.jpg|Wireless receiver board - top | ||
| + | File:Wireless Board-Bottom.jpg|Wireless receiver board - bottom | ||
| + | File:Power Board-top.jpg|Power board - top | ||
| + | File:Power Board-Bottom.jpg|Power board - bottom | ||
| + | File:Pinout.png|Pinout of connector on Power Board that connects to Roborock S5 | ||
| + | </gallery> | ||
| + | |||
| + | ==Mechanical Pictures== | ||
| + | <gallery mode="packed-hover" heights="200"> | ||
| + | File:Bearing Motor-side.jpg|DC Motor and Bearing | ||
| + | File:Inductors.jpg|Inductors used for wireless power | ||
| + | File:Laser Camera-front.jpg|Laser and Lens housing module, CMOS sensor board mounts to this | ||
| + | File:Module Base-top.jpg|Base housing - top | ||
| + | File:Module Base-bottom.jpg|Base housing - bottom | ||
| + | File:Rotator-top.jpg|Rotating housing - top | ||
| + | File:Rotator-bottom.jpg|Rotating housing - bottom | ||
| + | File:Belt Shield-top.jpg|Belt and lens/laser hood | ||
| + | </gallery> | ||
| + | |||
| + | ==Analysis of Hardware== | ||
| + | To be completed | ||
| + | <br /> | ||
| + | |||
| + | ==Additional/Novel Uses== | ||
| + | To be completed | ||
Latest revision as of 03:18, 22 October 2020

LIDAR from the Xiaomi robotic vacuum, very similar in design to the one used in the Neato XV-11.
Contents
Teardown Video
5 minute video showing all the parts of the LIDAR and how they go together, helps to understand all the parts and pieces pictured below.
PCB Pictures
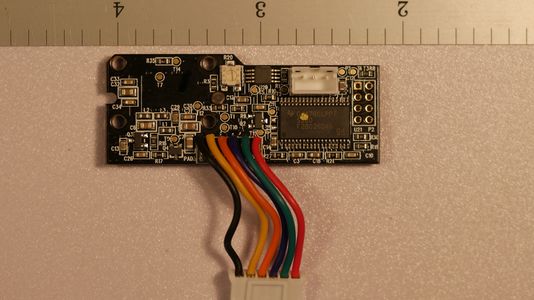
LIDAR CMOS sensor and DSP board - top side
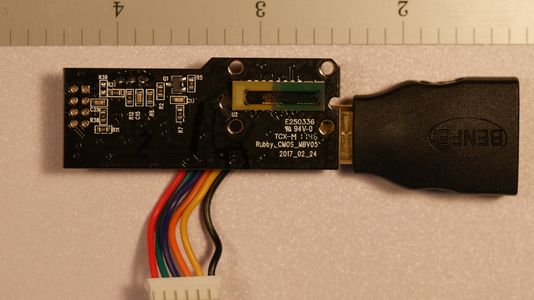
LIDAR CMOS sensor and DSP board - bottom side (BENFEI connector to balance board for picture)
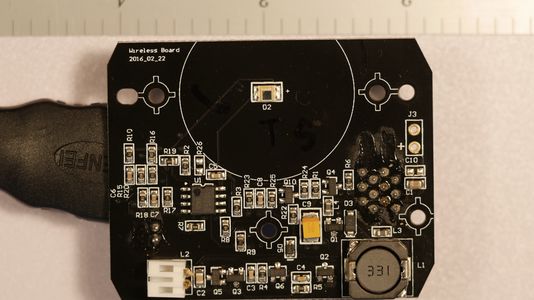
Wireless receiver board - top
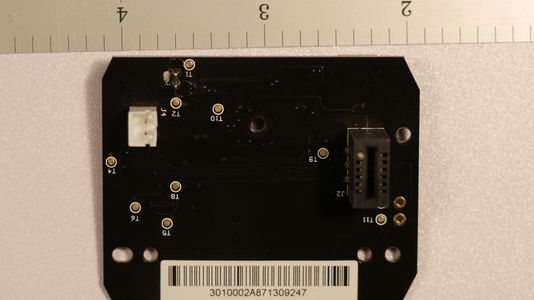
Wireless receiver board - bottom
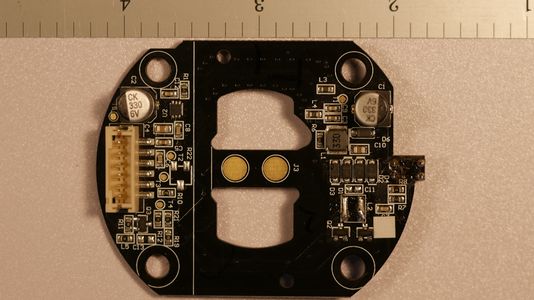
Power board - top
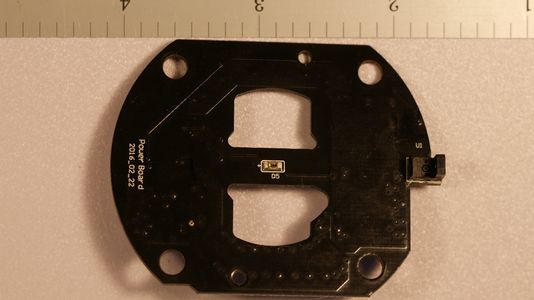
Power board - bottom
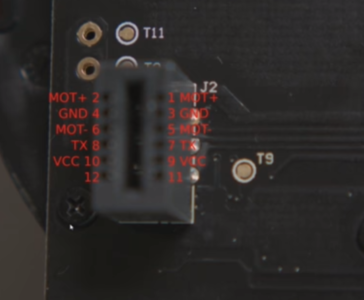
Pinout of connector on Power Board that connects to Roborock S5







Mechanical Pictures
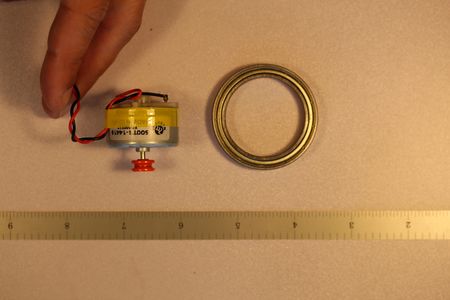
DC Motor and Bearing

Inductors used for wireless power
Laser and Lens housing module, CMOS sensor board mounts to this

Base housing - top

Base housing - bottom

Rotating housing - top

Rotating housing - bottom
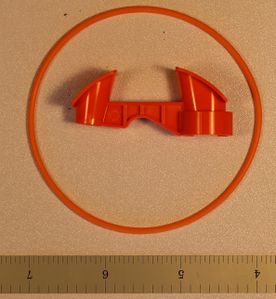
Belt and lens/laser hood








Analysis of Hardware
To be completed
Additional/Novel Uses
To be completed